
Hi,
I'm trying to use an accelerometer from Analog Device (ADXL345) with the nRF52840 Eval kit. I'm using SES and I tried to rely on the example given in the SDK.
I've first written a program that worked but I created all the functions that I need in the main file. However, I'd like to adapt this code by creating two files (a .c file and a .h) that would handle the different functions targeting the accelerometer. Unfortunately, I always get the same problem whenever I try to build which is the one written in the title.
Here is a screenshot of the code with the output: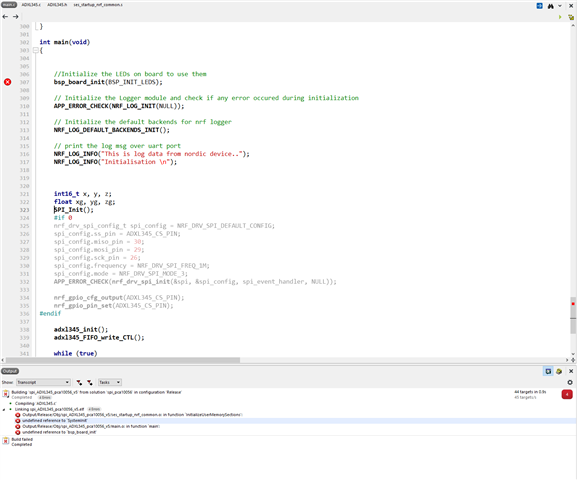
This main.c file is the one already working:
#include <string.h>
#include <math.h>
#include "nrf.h"
#include "nrf_gpio.h"
#include "nrf_delay.h"
#include "nrf_drv_spi.h"
#include "boards.h"
#include "SEGGER_RTT.h"
// Must include these headers to work with nrf logger
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#define ADXL345_REG_DEVID 0x00
#define ADXL345_REG_DATAX0 0x32
#define ADXL345_REG_DATA_FORMAT 0x31
#define ADXL345_REG_POWER_CTL 0x2D
#define ADXL345_REG_FIFO_CTRL 0x38
#define ADXL345_REG_FIFO_STS 0x39
#define ADXL345_REG_BW_RATE 0x2C
#define SCALE_FACTOR_4G 7.8
#define ADXL345_SPI_INSTANCE 0
#define ADXL345_CS_PIN 31
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(ADXL345_SPI_INSTANCE);
static volatile bool spi_xfer_done;
void spi_event_handler(nrf_drv_spi_evt_t const * p_event, void * p_context)
{
spi_xfer_done = true;
//nrf_gpio_pin_set(ADXL345_CS_PIN);
}
# if 0
void ADXL375_SPI_writeRegister(uint8_t reg_addr, uint8_t * p_data, uint8_t bytes)
{
uint32_t err_code;
uint8_t m_tx_data_spi[bytes+1];
uint8_t m_rx_data_spi[bytes+1];
memcpy(&m_tx_data_spi+1,p_data,bytes);
if(bytes > 1)
{
m_tx_data_spi[0] = (reg_addr|0x40);
}
else
{
m_tx_data_spi[0] = reg_addr;
}
// Pull Chip Select line low
nrf_gpio_pin_clear(ADXL345_CS_PIN);
err_code = nrf_drv_spi_transfer(&spi, m_tx_data_spi,
sizeof(m_tx_data_spi), m_rx_data_spi, sizeof(m_rx_data_spi));
APP_ERROR_CHECK(err_code);
// Set Chip Select line high
nrf_gpio_pin_set(ADXL345_CS_PIN);
spi_xfer_done = false;
}
void ADXL375_SPI_readRegister(uint8_t address, uint8_t * p_data, uint8_t bytes)
{
uint32_t err_code;
uint8_t m_tx_data_spi;
if(bytes > 1)
{
m_tx_data_spi = (0x80|address)|0x40;
}
else
{
m_tx_data_spi = 0x80|address;
}
// Pull Chip Select line low
nrf_gpio_pin_clear(ADXL345_CS_PIN);
err_code = nrf_drv_spi_transfer(&spi, &m_tx_data_spi,
bytes, p_data, bytes);
APP_ERROR_CHECK(err_code);
// Set Chipselect line high
nrf_gpio_pin_set(ADXL345_CS_PIN);
spi_xfer_done = false;
}
void ADXL375_SPI_setDataRate(uint8_t rate)
{
// NRF_LOG_INFO("Setting Data Rate Register: %x \n", rate);
uint8_t m_rx_data_spi[2];
ADXL375_SPI_writeRegister(0x2C,&rate,1);
// Read the register and check if it was set correctly
ADXL375_SPI_readRegister(0x2C,m_rx_data_spi, sizeof(m_rx_data_spi));
if(m_rx_data_spi[1] != rate)
{
SEGGER_RTT_WriteString(0,"Failed to set data rate!\n");
}
else
{
SEGGER_RTT_WriteString(0,"Data rate set sucessful!\n");
}
}
#endif
void adxl345_init(void)
{
uint32_t err_code;
// Read measurement mode
uint8_t tx_data4[2] = {ADXL345_REG_POWER_CTL|0x80, 0};
uint8_t rx_data4[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data4, 2, rx_data4, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Read measurement mode: 0x%02X \n",rx_data4[1]);
// Set to measurement mode
uint8_t tx_data[2] = {ADXL345_REG_POWER_CTL, (uint8_t)(rx_data4[1u] | 0x08u)};
uint8_t rx_data[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
// Read measurement mode
uint8_t tx_data5[2] = {ADXL345_REG_POWER_CTL|0x80, 0};
uint8_t rx_data5[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data5, 2, rx_data5, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Read measurement mode: 0x%02X \n",rx_data5[1]);
//Set data rate
uint8_t tx_data_2[2] = {ADXL345_REG_BW_RATE, 0x0A};
uint8_t rx_data_2[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_2, 2, rx_data_2, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
// Read data rate
uint8_t tx_data_3[2] = {ADXL345_REG_BW_RATE | 0x80, 0};
uint8_t rx_data_3[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_3, 2, rx_data_3, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Check of data rate sent: %X \n Check of data rate received: %X \n",tx_data_2[1], rx_data_3[1]);
//Set resolution and range
uint8_t tx_data_4[2] = {ADXL345_REG_DATA_FORMAT, 0x01};
uint8_t rx_data_4[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_4, 2, rx_data_4, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//Read resolution range
uint8_t tx_data_5[2] = {ADXL345_REG_DATA_FORMAT | 0x80, 0};
uint8_t rx_data_5[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_5, 2, rx_data_5, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Check of resolution range sent: %X \n Check of resolution range received: %X \n",tx_data_4[1], rx_data_5[1]);
// Set FIFO CTL
uint8_t tx_data_6[2] = {ADXL345_REG_FIFO_CTRL, 0x80};
uint8_t rx_data_6[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_6, 2, rx_data_6, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//Read FIFO CTL
uint8_t tx_data_7[2] = {ADXL345_REG_FIFO_CTRL | 0x80, 0};
uint8_t rx_data_7[2] = {0,0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_7, 2, rx_data_7, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
if (rx_data_7[1]!=tx_data_6[1]) { NRF_LOG_INFO( "FIFO_CTL sent: 0x%02X \n FIFO_CTL received: 0x%02X \n",tx_data[1], rx_data_2[1]);}//NRF_LOG_INFO( "Not same value sent and received from FIFO_CTL \n");}
else {NRF_LOG_INFO( "Same value sent and receive");}
}
void adxl345_FIFO_write_CTL(void){
// Set FIFO CTL
uint8_t tx_data[2] = {ADXL345_REG_FIFO_CTRL, 0x80};
uint8_t rx_data[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
/*
//test comm initial
uint8_t tx_data_3[2] = {0x00| 0x80, 0x00};
uint8_t rx_data_3[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_3, 2, rx_data_3, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Adress of accelerometer is: 0x%02X \n",rx_data_3[1]);
*/
//Read FIFO CTL
uint8_t tx_data_2[2] = {ADXL345_REG_FIFO_CTRL | 0x80, 0};
uint8_t rx_data_2[2] = {0,0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_2, 2, rx_data_2, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
if (rx_data_2[1]!=tx_data[1]) { NRF_LOG_INFO( "FIFO_CTL sent: 0x%02X \n FIFO_CTL received: 0x%02X \n",tx_data[1], rx_data_2[1]);}//NRF_LOG_INFO( "Not same value sent and received from FIFO_CTL \n");}
else {NRF_LOG_INFO( "Same value sent and received from FIFO_CTL \n");}
}
bool adxl345_read_fifo_status(void)
{
// Read FIFO status and return true if there are values to read
uint8_t tx_data[2] = {ADXL345_REG_FIFO_STS|0x80, 0};
uint8_t rx_data[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//NRF_LOG_INFO( "FIFO Entries : 0x%02X \n",(rx_data[1] & 0x3Fu));
return (bool)((rx_data[1] & 0x3Fu) != 0u);
}
void adxl345_read_acceleration(int16_t *x, int16_t *y, int16_t *z)
{
uint8_t tx_data = ADXL345_REG_DATAX0 | 0x80 |0x40;
uint8_t rx_data[8] = {0, 0, 0, 0, 0, 0, 0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, &tx_data, 8, rx_data, 8);
while (!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
*x = (((int16_t)rx_data[2] << 8 | rx_data[1])) * SCALE_FACTOR_4G;
*y = (((int16_t)rx_data[4] << 8 | rx_data[3])) * SCALE_FACTOR_4G;
*z = (((int16_t)rx_data[6] << 8 | rx_data[5])) * SCALE_FACTOR_4G;
}
int main(void)
{
//Initialize the LEDs on board to use them
bsp_board_init(BSP_INIT_LEDS);
// Initialize the Logger module and check if any error occured during initialization
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
// Initialize the default backends for nrf logger
NRF_LOG_DEFAULT_BACKENDS_INIT();
// print the log msg over uart port
NRF_LOG_INFO("This is log data from nordic device..");
NRF_LOG_INFO("Initialisation \n");
int16_t x, y, z;
float xg, yg, zg;
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = ADXL345_CS_PIN;
spi_config.miso_pin = 30;
spi_config.mosi_pin = 29;
spi_config.sck_pin = 26;
spi_config.frequency = NRF_DRV_SPI_FREQ_1M;
spi_config.mode = NRF_DRV_SPI_MODE_3;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL));
nrf_gpio_cfg_output(ADXL345_CS_PIN);
nrf_gpio_pin_set(ADXL345_CS_PIN);
adxl345_init();
adxl345_FIFO_write_CTL();
while (true)
{
if (adxl345_read_fifo_status() != false)
{
//NRF_LOG_INFO( "Range acceleromter: %X \n", adxl345_read_range())
adxl345_read_acceleration(&x, &y, &z);
xg= (float)x *SCALE_FACTOR_4G /(pow(10,3));
yg= (float)y *SCALE_FACTOR_4G/(pow(10,3));
zg= (float)z *SCALE_FACTOR_4G/(pow(10,3));
NRF_LOG_INFO("x avec facteur: "NRF_LOG_FLOAT_MARKER" g, x: %d \r", NRF_LOG_FLOAT(xg), x);
NRF_LOG_INFO("y avec facteur: "NRF_LOG_FLOAT_MARKER" g, y: %d \r", NRF_LOG_FLOAT(yg), y);
NRF_LOG_INFO("z avec facteur: "NRF_LOG_FLOAT_MARKER" g, z: %d \r\n", NRF_LOG_FLOAT(zg), z);
}
NRF_LOG_FLUSH();
nrf_delay_ms(100);
}
}
Theses next three files are respectively the main.c. I just send this one because it seems that I can't send the rest directly
#include "ADXL345.h"
/*
#include <string.h>
#include <math.h>
#include "nrf.h"
#include "nrf_gpio.h"
#include "nrf_delay.h"
#include "nrf_drv_spi.h"
#include "boards.h"
#include "SEGGER_RTT.h"
// Must include these headers to work with nrf logger
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#define ADXL345_REG_DEVID 0x00
#define ADXL345_REG_DATAX0 0x32
#define ADXL345_REG_DATA_FORMAT 0x31
#define ADXL345_REG_POWER_CTL 0x2D
#define ADXL345_REG_FIFO_CTRL 0x38
#define ADXL345_REG_FIFO_STS 0x39
#define ADXL345_REG_BW_RATE 0x2C
#define SCALE_FACTOR_4G 7.8
#define ADXL345_SPI_INSTANCE 0
#define ADXL345_CS_PIN 31
*/
static volatile bool spi_xfer_done; /* Flag used to indicate that SPI instance completed the transfer. */
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(ADXL345_SPI_INSTANCE);
#if 0
//flag géré dans l'interruption de la com SPI. Passe True après envoie de trame
void spi_event_handler(nrf_drv_spi_evt_t const * p_event, void * p_context)
{
spi_xfer_done = true;
//nrf_gpio_pin_set(ADXL345_CS_PIN);
}
#endif
# if 0
void ADXL375_SPI_writeRegister(uint8_t reg_addr, uint8_t * p_data, uint8_t bytes)
{
uint32_t err_code;
uint8_t m_tx_data_spi[bytes+1];
uint8_t m_rx_data_spi[bytes+1];
memcpy(&m_tx_data_spi+1,p_data,bytes);
if(bytes > 1)
{
m_tx_data_spi[0] = (reg_addr|0x40);
}
else
{
m_tx_data_spi[0] = reg_addr;
}
// Pull Chip Select line low
nrf_gpio_pin_clear(ADXL345_CS_PIN);
err_code = nrf_drv_spi_transfer(&spi, m_tx_data_spi,
sizeof(m_tx_data_spi), m_rx_data_spi, sizeof(m_rx_data_spi));
APP_ERROR_CHECK(err_code);
// Set Chip Select line high
nrf_gpio_pin_set(ADXL345_CS_PIN);
spi_xfer_done = false;
}
void ADXL375_SPI_readRegister(uint8_t address, uint8_t * p_data, uint8_t bytes)
{
uint32_t err_code;
uint8_t m_tx_data_spi;
if(bytes > 1)
{
m_tx_data_spi = (0x80|address)|0x40;
}
else
{
m_tx_data_spi = 0x80|address;
}
// Pull Chip Select line low
nrf_gpio_pin_clear(ADXL345_CS_PIN);
err_code = nrf_drv_spi_transfer(&spi, &m_tx_data_spi,
bytes, p_data, bytes);
APP_ERROR_CHECK(err_code);
// Set Chipselect line high
nrf_gpio_pin_set(ADXL345_CS_PIN);
spi_xfer_done = false;
}
void ADXL375_SPI_setDataRate(uint8_t rate)
{
// NRF_LOG_INFO("Setting Data Rate Register: %x \n", rate);
uint8_t m_rx_data_spi[2];
ADXL375_SPI_writeRegister(0x2C,&rate,1);
// Read the register and check if it was set correctly
ADXL375_SPI_readRegister(0x2C,m_rx_data_spi, sizeof(m_rx_data_spi));
if(m_rx_data_spi[1] != rate)
{
SEGGER_RTT_WriteString(0,"Failed to set data rate!\n");
}
else
{
SEGGER_RTT_WriteString(0,"Data rate set sucessful!\n");
}
}
#endif
void adxl345_init(void)
{
uint8_t rx_data4[2];
ADXL375_SPI_readRegister(ADXL345_REG_POWER_CTL, rx_data4, sizeof(rx_data4));
NRF_LOG_INFO( "Read measurement mode avec fonction: 0x%02X \n",rx_data4[1]);
/*// Read measurement mode
uint8_t tx_data4[2] = {ADXL345_REG_POWER_CTL|0x80, 0};
uint8_t rx_data4[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data4, 2, rx_data4, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Read measurement mode: 0x%02X \n",rx_data4[1]);
*/
// Set to measurement mode
uint8_t tx_data[2] = {ADXL345_REG_POWER_CTL, (uint8_t)(rx_data4[1u] | 0x08u)};
uint8_t rx_data[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
// Read measurement mode
uint8_t tx_data5[2] = {ADXL345_REG_POWER_CTL|0x80, 0};
uint8_t rx_data5[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data5, 2, rx_data5, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Read measurement mode: 0x%02X \n",rx_data5[1]);
//Set data rate
uint8_t tx_data_2[2] = {ADXL345_REG_BW_RATE, 0x0A};
uint8_t rx_data_2[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_2, 2, rx_data_2, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
// Read data rate
uint8_t tx_data_3[2] = {ADXL345_REG_BW_RATE | 0x80, 0};
uint8_t rx_data_3[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_3, 2, rx_data_3, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Check of data rate sent: %X \n Check of data rate received: %X \n",tx_data_2[1], rx_data_3[1]);
//Set resolution and range
uint8_t tx_data_4[2] = {ADXL345_REG_DATA_FORMAT, 0x01};
uint8_t rx_data_4[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_4, 2, rx_data_4, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//Read resolution range
uint8_t tx_data_5[2] = {ADXL345_REG_DATA_FORMAT | 0x80, 0};
uint8_t rx_data_5[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_5, 2, rx_data_5, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Check of resolution range sent: %X \n Check of resolution range received: %X \n",tx_data_4[1], rx_data_5[1]);
// Set FIFO CTL
uint8_t tx_data_6[2] = {ADXL345_REG_FIFO_CTRL, 0x80};
uint8_t rx_data_6[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_6, 2, rx_data_6, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//Read FIFO CTL
uint8_t tx_data_7[2] = {ADXL345_REG_FIFO_CTRL | 0x80, 0};
uint8_t rx_data_7[2] = {0,0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_7, 2, rx_data_7, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
if (rx_data_7[1]!=tx_data_6[1]) { NRF_LOG_INFO( "FIFO_CTL sent: 0x%02X \n FIFO_CTL received: 0x%02X \n",tx_data[1], rx_data_2[1]);}//NRF_LOG_INFO( "Not same value sent and received from FIFO_CTL \n");}
else {NRF_LOG_INFO( "Same value sent and receive");}
}
void adxl345_FIFO_write_CTL(void){
// Set FIFO CTL
uint8_t tx_data[2] = {ADXL345_REG_FIFO_CTRL, 0x80};
uint8_t rx_data[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
/*
//test comm initial
uint8_t tx_data_3[2] = {0x00| 0x80, 0x00};
uint8_t rx_data_3[2]= {0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_3, 2, rx_data_3, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
NRF_LOG_INFO( "Adress of accelerometer is: 0x%02X \n",rx_data_3[1]);
*/
//Read FIFO CTL
uint8_t tx_data_2[2] = {ADXL345_REG_FIFO_CTRL | 0x80, 0};
uint8_t rx_data_2[2] = {0,0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data_2, 2, rx_data_2, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
if (rx_data_2[1]!=tx_data[1]) { NRF_LOG_INFO( "FIFO_CTL sent: 0x%02X \n FIFO_CTL received: 0x%02X \n",tx_data[1], rx_data_2[1]);}//NRF_LOG_INFO( "Not same value sent and received from FIFO_CTL \n");}
else {NRF_LOG_INFO( "Same value sent and received from FIFO_CTL \n");}
}
bool adxl345_read_fifo_status(void)
{
// Read FIFO status and return true if there are values to read
uint8_t tx_data[2] = {ADXL345_REG_FIFO_STS|0x80, 0};
uint8_t rx_data[2];
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, 2, rx_data, 2);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
//NRF_LOG_INFO( "FIFO Entries : 0x%02X \n",(rx_data[1] & 0x3Fu));
return (bool)((rx_data[1] & 0x3Fu) != 0u);
}
void adxl345_read_acceleration(int16_t *x, int16_t *y, int16_t *z)
{
uint8_t tx_data = ADXL345_REG_DATAX0 | 0x80 |0x40;
uint8_t rx_data[8] = {0, 0, 0, 0, 0, 0, 0, 0};
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, &tx_data, 8, rx_data, 8);
while (!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
*x = (((int16_t)rx_data[2] << 8 | rx_data[1])) * SCALE_FACTOR_4G;
*y = (((int16_t)rx_data[4] << 8 | rx_data[3])) * SCALE_FACTOR_4G;
*z = (((int16_t)rx_data[6] << 8 | rx_data[5])) * SCALE_FACTOR_4G;
}
int main(void)
{
//Initialize the LEDs on board to use them
bsp_board_init(BSP_INIT_LEDS);
// Initialize the Logger module and check if any error occured during initialization
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
// Initialize the default backends for nrf logger
NRF_LOG_DEFAULT_BACKENDS_INIT();
// print the log msg over uart port
NRF_LOG_INFO("This is log data from nordic device..");
NRF_LOG_INFO("Initialisation \n");
int16_t x, y, z;
float xg, yg, zg;
SPI_Init();
#if 0
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = ADXL345_CS_PIN;
spi_config.miso_pin = 30;
spi_config.mosi_pin = 29;
spi_config.sck_pin = 26;
spi_config.frequency = NRF_DRV_SPI_FREQ_1M;
spi_config.mode = NRF_DRV_SPI_MODE_3;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL));
nrf_gpio_cfg_output(ADXL345_CS_PIN);
nrf_gpio_pin_set(ADXL345_CS_PIN);
#endif
adxl345_init();
adxl345_FIFO_write_CTL();
while (true)
{
if (adxl345_read_fifo_status() != false)
{
//NRF_LOG_INFO( "Range acceleromter: %X \n", adxl345_read_range())
adxl345_read_acceleration(&x, &y, &z);
xg= (float)x *SCALE_FACTOR_4G /(pow(10,3));
yg= (float)y *SCALE_FACTOR_4G/(pow(10,3));
zg= (float)z *SCALE_FACTOR_4G/(pow(10,3));
NRF_LOG_INFO("x avec facteur: "NRF_LOG_FLOAT_MARKER" g, x: %d \r", NRF_LOG_FLOAT(xg), x);
NRF_LOG_INFO("y avec facteur: "NRF_LOG_FLOAT_MARKER" g, y: %d \r", NRF_LOG_FLOAT(yg), y);
NRF_LOG_INFO("z avec facteur: "NRF_LOG_FLOAT_MARKER" g, z: %d \r\n", NRF_LOG_FLOAT(zg), z);
}
NRF_LOG_FLUSH();
nrf_delay_ms(100);
}
}

