
Hi,
This post is the continuation of this project: Undefined reference to `SystemInit' and undefined reference to "bsp_board_init"
It turns out that I probably didn't include the c. and h. files well into the project so I decided to create a new one based on it yet. The program worked until I deleted the first version. It turned out that I copy paste some part of it including the path of the include files. So when I deleted the first version, the include path didn't exist anymore. So I wrote again the good one and now I can't even build anymore.
Here is the code of ADXL345.c :
#include "ADXL345.h"
//flag generated dans when interrupt of SPI com. Become True after a frame is sent.
void spi_event_handler(nrf_drv_spi_evt_t const * p_event, void * p_context)
{
spi_xfer_done = true;
//nrf_gpio_pin_set(ADXL345_CS_PIN);
}
void SPI_Init(void){
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = ADXL345_CS_PIN;
spi_config.miso_pin = ADXL345_MISO_PIN;
spi_config.mosi_pin = ADXL345_MOSI_PIN;
spi_config.sck_pin = ADXL345_SCK_PIN;
spi_config.frequency = NRF_DRV_SPI_FREQ_1M;
spi_config.mode = NRF_DRV_SPI_MODE_3;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL));
nrf_gpio_cfg_output(ADXL345_CS_PIN);
nrf_gpio_pin_set(ADXL345_CS_PIN);
}
void ADXL345_SPI_readRegister(uint8_t address, uint8_t * rx_data, uint8_t bytes)
{
uint8_t tx_data;
if(bytes > 1)
{
tx_data = (0x80|address)|0x40;
}
else
{
tx_data = 0x80|address;
}
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, &tx_data, bytes+1, rx_data, bytes+1);
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
}
void ADXL345_SPI_writeRegister(uint8_t reg_addr, uint8_t * p_data, uint8_t bytes)
{
uint8_t tx_data[2];
uint8_t rx_data[2];
if(bytes > 1)
{
tx_data[0] = (reg_addr|0x40);
}
else
{
tx_data[0] = reg_addr;
}
tx_data[1]=*p_data;
nrf_gpio_pin_clear(ADXL345_CS_PIN);
spi_xfer_done=false;
nrf_drv_spi_transfer(&spi, tx_data, sizeof(tx_data), rx_data, sizeof(rx_data));
while(!spi_xfer_done){}
nrf_gpio_pin_set(ADXL345_CS_PIN);
}
void adxl345_init(void)
{
//Read measurement mode
uint8_t rx_data[2];
ADXL345_SPI_readRegister(ADXL345_REG_POWER_CTL, &rx_data[0], 1);
NRF_LOG_INFO( "Read measurement mode avec fonction: 0x%02X \n",rx_data[1]);
//Read test
ADXL345_SPI_readRegister(0x00, &rx_data[0], 1);
NRF_LOG_INFO( "TEST: 0x%02X \r",rx_data[1]);
//Set measurement mode
uint8_t tx_data[2] = {ADXL345_REG_POWER_CTL, 0x08u};
ADXL345_SPI_writeRegister(ADXL345_REG_POWER_CTL, &tx_data[1], 1);
NRF_LOG_INFO( "Set measurement mode with function: done \r");
//Read measurement mode
ADXL345_SPI_readRegister(ADXL345_REG_POWER_CTL, rx_data, 1);
NRF_LOG_INFO( "Read measurement mode avec fonction: 0x%02X \r",rx_data[1]);
//Compare value sent and received
if (rx_data[1]!=tx_data[1]) { NRF_LOG_INFO( "Measurement mode sent: 0x%02X \n Measure mode received: 0x%02X \n",tx_data[1], rx_data[1]);}
else {NRF_LOG_INFO( "Same measure mode sent and received");}
//Set data rate
uint8_t tx_data_2[2] = {ADXL345_REG_BW_RATE, 0x0A};
ADXL345_SPI_writeRegister(ADXL345_REG_BW_RATE, &tx_data_2[1], 1);
NRF_LOG_INFO( "Set data rate with function: done \r");
// Read data rate
ADXL345_SPI_readRegister(ADXL345_REG_BW_RATE, rx_data, 1);
NRF_LOG_INFO( "Read data rate with fonction: 0x%02X \r",rx_data[1]);
//Compare value sent and received
if (rx_data[1]!=tx_data_2[1]) { NRF_LOG_INFO( "Data rate sent: 0x%02X \n Data rate received: 0x%02X \n",tx_data_2[1], rx_data[1]);}
else {NRF_LOG_INFO( "Same data rate sent and received");}
//Set resolution and range
uint8_t tx_data_3[2] = {ADXL345_REG_DATA_FORMAT, 0x01};
ADXL345_SPI_writeRegister(ADXL345_REG_DATA_FORMAT, &tx_data_3[1], 1);
NRF_LOG_INFO( "Set resolution and range: done \r");
//Read resolution range
ADXL345_SPI_readRegister(ADXL345_REG_DATA_FORMAT, rx_data, 1);
NRF_LOG_INFO( "Read resolution and range with fonction: 0x%02X \r",rx_data[1]);
//Compare value sent and received
if (rx_data[1]!=tx_data_3[1]) { NRF_LOG_INFO( "Resolution and range sent: 0x%02X \n Resolution and range received: 0x%02X \n",tx_data_3[1], rx_data[1]);}
else {NRF_LOG_INFO( "Same resolution and range sent and received");}
// Set FIFO CTL
uint8_t tx_data_4[2] = {ADXL345_REG_FIFO_CTRL, 0x80};
ADXL345_SPI_writeRegister(ADXL345_REG_FIFO_CTRL, &tx_data_4[1], 1);
NRF_LOG_INFO( "Set FIFO CTL: done \r");
//Read FIFO CTL
ADXL345_SPI_readRegister(ADXL345_REG_FIFO_CTRL, rx_data, 1);
NRF_LOG_INFO( "Read FIFO CTL with fonction: 0x%02X \n",rx_data[1]);
if (rx_data[1]!=tx_data_4[1]) { NRF_LOG_INFO( "FIFO_CTL sent: 0x%02X \n FIFO_CTL received: 0x%02X \n",tx_data_4[1], rx_data[1]);}
else {NRF_LOG_INFO( "FIFO CTL same value sent and received");}
}
bool adxl345_read_fifo_status(void)
{
// Read FIFO status and return true if there are values to read
uint8_t tx_data[2] = {ADXL345_REG_FIFO_STS|0x80, 0};
uint8_t rx_data[2];
ADXL345_SPI_readRegister(ADXL345_REG_FIFO_STS, rx_data, 1);
return (bool)((rx_data[1] & 0x3Fu) != 0u);
}
void adxl345_read_acceleration(int16_t *x, int16_t *y, int16_t *z)
{
uint8_t tx_data = ADXL345_REG_DATAX0 | 0x80 |0x40;
uint8_t rx_data[7] = {0, 0, 0, 0, 0, 0, 0};
ADXL345_SPI_readRegister(ADXL345_REG_DATAX0, rx_data, 6);
*x = (((int16_t)rx_data[2] << 8 | rx_data[1])) * SCALE_FACTOR_4G;
*y = (((int16_t)rx_data[4] << 8 | rx_data[3])) * SCALE_FACTOR_4G;
*z = (((int16_t)rx_data[6] << 8 | rx_data[5])) * SCALE_FACTOR_4G;
}
Here is the code of the main.c :
#include "ADXL345.h"
int main(void)
{
//Initialize the LEDs on board to use them
bsp_board_init(BSP_INIT_LEDS);
// Initialize the Logger module and check if any error occured during initialization
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
// Initialize the default backends for nrf logger
NRF_LOG_DEFAULT_BACKENDS_INIT();
// print the log msg over uart port
NRF_LOG_INFO("This is log data from nordic device..");
NRF_LOG_INFO("Initialisation \n");
int16_t x, y, z;
float xg, yg, zg;
SPI_Init();
adxl345_init();
while (true)
{
if (adxl345_read_fifo_status() != false)
{
//NRF_LOG_INFO( "Range acceleromter: %X \n", adxl345_read_range())
adxl345_read_acceleration(&x, &y, &z);
xg= (float)x *SCALE_FACTOR_4G /(pow(10,3));
yg= (float)y *SCALE_FACTOR_4G/(pow(10,3));
zg= (float)z *SCALE_FACTOR_4G/(pow(10,3));
NRF_LOG_INFO("x avec facteur: "NRF_LOG_FLOAT_MARKER" g, x: %d \r", NRF_LOG_FLOAT(xg), x);
NRF_LOG_INFO("y avec facteur: "NRF_LOG_FLOAT_MARKER" g, y: %d \r", NRF_LOG_FLOAT(yg), y);
NRF_LOG_INFO("z avec facteur: "NRF_LOG_FLOAT_MARKER" g, z: %d \r\n", NRF_LOG_FLOAT(zg), z);
}
NRF_LOG_FLUSH();
nrf_delay_ms(100);
}
}
I also created an header for the ADXL345 with all the declarations and definitions.
The following picture is the output I get:
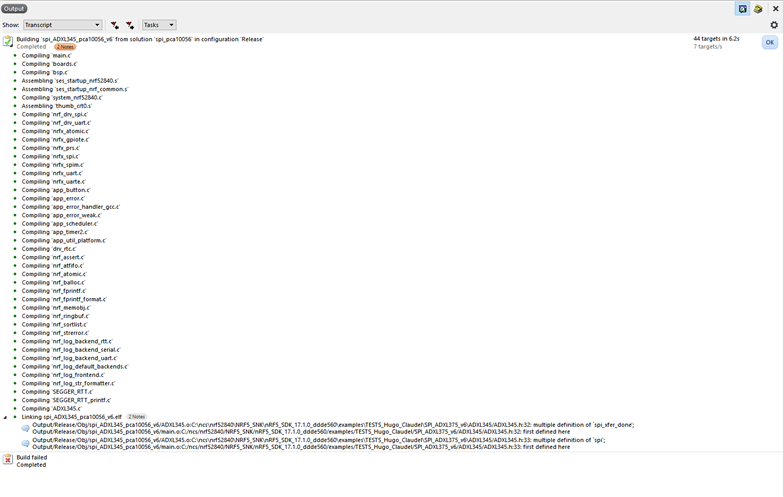
I really need your help because it doesn't make any sense for me that it used to work and now it doesn't anymore.
Looking forward for your answer,
Kind regards


