We designed a board based on the nRF52840, and are using nrf5 SDK 17.1.0 with S140 SoftDevice. We are using a QSPI flash, MX25U51245G (https://www.macronix.com/Lists/Datasheet/Attachments/8736/MX25U51245G%2054,%201.8V,%20512Mb,%20v1.2.pdf), we are using the 8-WSON version with no Reset pin
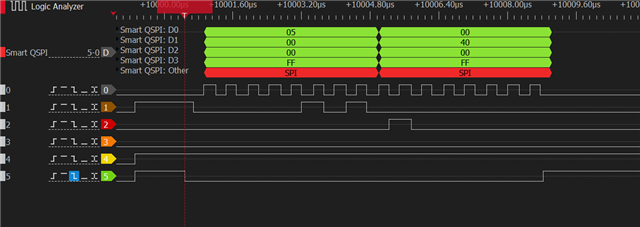
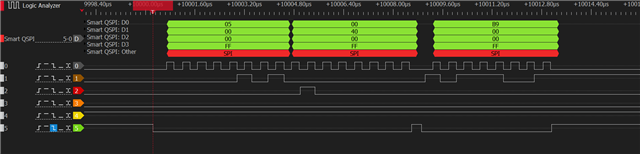
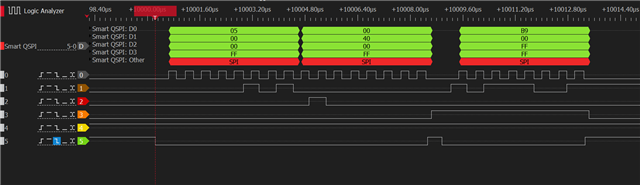
I have followed the QSPI example and the information provided here Exiting QSPI DPM mode when opening QSPI (memory has been put into DPM previously before QSPI was closed) I can successfully access the QSPI flash, and I can put it in deep power down mode using the code provided, or sending the deep power down command as a QSPI command (CMD_DEEP_PWRDOWN 0xB9).
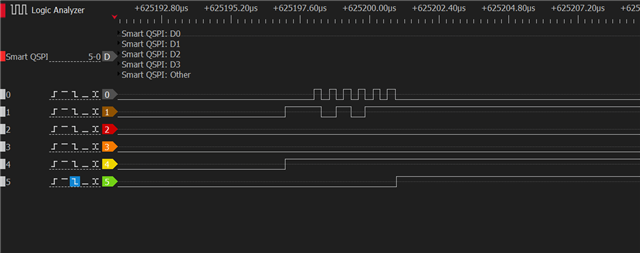
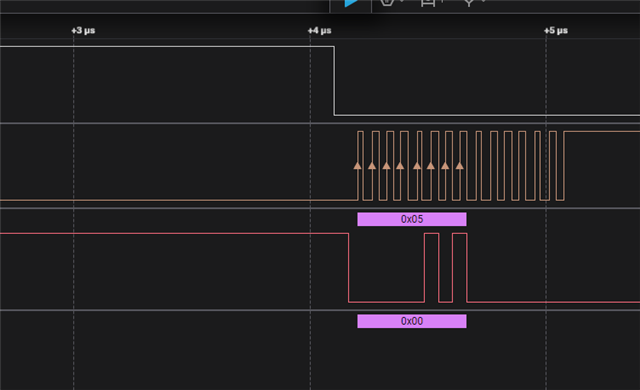
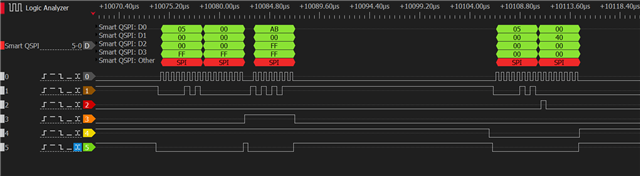
The problem is that this chip, unlike the one in the DK, does not exit deep power down by holding CS high for the proper time, but requires a command (RDP = 0xAB), see 10-4. Release from Deep Power-down (RDP). When I re-initialize the QSPI peripheral with the flash chip in power down, I get a NRF_ERROR_TIMEOUT because the chip doesn't seem to respond to whatever command the QSPI peripheral is using to wake up the device. nrfx_qspi_init fails when executing NRFX_WAIT_FOR(nrf_qspi_event_check(NRF_QSPI, NRF_QSPI_EVENT_READY), QSPI_DEF_WAIT_ATTEMPTS, QSPI_DEF_WAIT_TIME_US, result);
I'm not sure I understand what nrf_qspi_task_trigger(NRF_QSPI, NRF_QSPI_TASK_ACTIVATE); is doing, but when my flash chip is in deep power down, that never completes and blocks the QSPI peripheral preventing to send any other command
Is there a way to send the 0xAB command to release my flash chip from deep sleep?