
Hi there,
So I am using an adapted version of the echo sample for I2S in the nRF Connect SDK in VS Code. I only want to use the echo example in receiving mode, so I have removed the transmit data function calls. I am using the microphone SPH0465 with the nRF52832 (slave mode).
Here is my adapted example.
/*
* Copyright (c) 2021 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
// #include "codec.h"
#include <zephyr/sys/printk.h>
#include <zephyr/drivers/i2s.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/sys/util.h>
#include <zephyr/sys/printk.h>
#include <inttypes.h>
#include <zephyr/logging/log.h>
#include <zephyr/logging/log_ctrl.h>
#include <string.h>
#include <zephyr/drivers/pwm.h>
#include <zephyr/drivers/uart.h>
LOG_MODULE_REGISTER(MODULE, 3);
#if DT_NODE_EXISTS(DT_NODELABEL(i2s_rxtx))
#define I2S_RX_NODE DT_NODELABEL(i2s_rxtx)
#define I2S_TX_NODE I2S_RX_NODE
#else
#define I2S_RX_NODE DT_NODELABEL(i2s_rx)
#define I2S_TX_NODE DT_NODELABEL(i2s_rx)
#endif
#define SAMPLE_FREQUENCY 44100
#define SAMPLE_BIT_WIDTH 24
#define BYTES_PER_SAMPLE sizeof(int32_t)
#define NUMBER_OF_CHANNELS 2
/* Such block length provides an echo with the delay of 100 ms. */
#define SAMPLES_PER_BLOCK 32
#define INITIAL_BLOCKS 2
#define TIMEOUT 1000
#define SW0_NODE DT_ALIAS(sw0)
#if DT_NODE_HAS_STATUS(SW0_NODE, okay)
static struct gpio_dt_spec sw0_spec = GPIO_DT_SPEC_GET(SW0_NODE, gpios);
#endif
#define SW1_NODE DT_ALIAS(sw1)
#if DT_NODE_HAS_STATUS(SW1_NODE, okay)
static struct gpio_dt_spec sw1_spec = GPIO_DT_SPEC_GET(SW1_NODE, gpios);
#endif
#define BLOCK_SIZE (BYTES_PER_SAMPLE * SAMPLES_PER_BLOCK)
#define MAX_BLOCK_SIZE BLOCK_SIZE
#define BLOCK_COUNT (INITIAL_BLOCKS + 2)
K_MEM_SLAB_DEFINE_STATIC(mem_slab, BLOCK_SIZE, BLOCK_COUNT, 4);
static int16_t echo_block[SAMPLES_PER_BLOCK];
static volatile bool echo_enabled = true;
static K_SEM_DEFINE(toggle_transfer, 1, 1);
#if DT_NODE_HAS_STATUS(SW0_NODE, okay)
static void sw0_handler(const struct device *dev, struct gpio_callback *cb,
uint32_t pins)
{
bool enable = !echo_enabled;
echo_enabled = enable;
printk("Echo %sabled\n", (enable ? "en" : "dis"));
}
#endif
#if DT_NODE_HAS_STATUS(SW1_NODE, okay)
static void sw1_handler(const struct device *dev, struct gpio_callback *cb,
uint32_t pins)
{
k_sem_give(&toggle_transfer);
}
#endif
// PWM DEFINES
static const struct pwm_dt_spec pwm_led0 = PWM_DT_SPEC_GET(DT_ALIAS(pwm_led0));
static const struct pwm_dt_spec pwm_led1 = PWM_DT_SPEC_GET(DT_ALIAS(pwm_led1));
// // frequency for pwm1 module
// // Frequency: 4 MHz -> Period: 250 ns (1 / 4 MHz)
// // Duty cycle: 50% -> Pulse width: 125 ns
#define PERIOD_PWM1_NSEC PWM_NSEC(1000U) // 250 nanoseconds for 4 MHz frequency
#define PULSE_WIDTH_PWM1_NSEC PWM_NSEC(PERIOD_PWM1_NSEC / 2U) // 50% duty cycle, so pulse width is half the period
// // frequency for pwm0 module
// // Frequency: 62,500 Hz -> Period: 16 µs (1 / 62500)
// // Duty cycle: 50% -> Pulse width: 8 µs
#define PERIOD_PWM0_NSEC PWM_NSEC(PERIOD_PWM1_NSEC * 64U) // 16 µs period for pwm1
#define PULSE_WIDTH_PWM0_NSEC PWM_NSEC(PERIOD_PWM0_NSEC / 2U) // 50% duty cycle = 8 µs pulse width
static bool init_buttons(void)
{
int ret;
#if DT_NODE_HAS_STATUS(SW0_NODE, okay)
static struct gpio_callback sw0_cb_data;
if (!gpio_is_ready_dt(&sw0_spec)) {
printk("%s is not ready\n", sw0_spec.port->name);
return false;
}
ret = gpio_pin_configure_dt(&sw0_spec, GPIO_INPUT);
if (ret < 0) {
printk("Failed to configure %s pin %d: %d\n",
sw0_spec.port->name, sw0_spec.pin, ret);
return false;
}
ret = gpio_pin_interrupt_configure_dt(&sw0_spec,
GPIO_INT_EDGE_TO_ACTIVE);
if (ret < 0) {
printk("Failed to configure interrupt on %s pin %d: %d\n",
sw0_spec.port->name, sw0_spec.pin, ret);
return false;
}
gpio_init_callback(&sw0_cb_data, sw0_handler, BIT(sw0_spec.pin));
gpio_add_callback(sw0_spec.port, &sw0_cb_data);
printk("Press \"%s\" to toggle the echo effect\n", sw0_spec.port->name);
#endif
#if DT_NODE_HAS_STATUS(SW1_NODE, okay)
static struct gpio_callback sw1_cb_data;
if (!gpio_is_ready_dt(&sw1_spec)) {
printk("%s is not ready\n", sw1_spec.port->name);
return false;
}
ret = gpio_pin_configure_dt(&sw1_spec, GPIO_INPUT);
if (ret < 0) {
printk("Failed to configure %s pin %d: %d\n",
sw1_spec.port->name, sw1_spec.pin, ret);
return false;
}
ret = gpio_pin_interrupt_configure_dt(&sw1_spec,
GPIO_INT_EDGE_TO_ACTIVE);
if (ret < 0) {
printk("Failed to configure interrupt on %s pin %d: %d\n",
sw1_spec.port->name, sw1_spec.pin, ret);
return false;
}
gpio_init_callback(&sw1_cb_data, sw1_handler, BIT(sw1_spec.pin));
gpio_add_callback(sw1_spec.port, &sw1_cb_data);
printk("Press \"%s\" to stop/restart I2S streams\n", sw1_spec.port->name);
#endif
(void)ret;
return true;
}
static void process_block_data(void *mem_block, uint32_t number_of_samples)
{
static bool clear_echo_block;
if (echo_enabled) {
for (int i = 0; i < number_of_samples; ++i) {
int16_t *sample = &((int16_t *)mem_block)[i];
*sample += echo_block[i];
echo_block[i] = (*sample) / 2;
}
clear_echo_block = true;
} else if (clear_echo_block) {
clear_echo_block = false;
memset(echo_block, 0, sizeof(echo_block));
}
}
static bool configure_streams(const struct device *i2s_dev_rx,
const struct device *i2s_dev_tx,
const struct i2s_config *config)
{
int ret;
if (i2s_dev_rx == i2s_dev_tx) {
ret = i2s_configure(i2s_dev_rx, I2S_DIR_BOTH, config);
if (ret == 0) {
return true;
}
/* -ENOSYS means that the RX and TX streams need to be
* configured separately.
*/
if (ret != -ENOSYS) {
printk("Failed to configure streams: %d\n", ret);
return false;
}
}
ret = i2s_configure(i2s_dev_rx, I2S_DIR_RX, config);
if (ret < 0) {
printk("Failed to configure RX stream: %d\n", ret);
return false;
}
ret = i2s_configure(i2s_dev_tx, I2S_DIR_TX, config);
if (ret < 0) {
printk("Failed to configure TX stream: %d\n", ret);
return false;
}
return true;
}
static bool prepare_transfer(const struct device *i2s_dev_rx,
const struct device *i2s_dev_tx)
{
int ret;
for (int i = 0; i < INITIAL_BLOCKS; ++i) {
void *mem_block;
ret = k_mem_slab_alloc(&mem_slab, &mem_block, K_NO_WAIT);
if (ret < 0) {
printk("Failed to allocate TX block %d: %d\n", i, ret);
return false;
}
memset(mem_block, 0, BLOCK_SIZE);
ret = i2s_write(i2s_dev_tx, mem_block, BLOCK_SIZE);
if (ret < 0) {
printk("Failed to write block %d: %d\n", i, ret);
return false;
}
}
return true;
}
static bool trigger_command(const struct device *i2s_dev_rx,
const struct device *i2s_dev_tx,
enum i2s_trigger_cmd cmd)
{
int ret;
// if (i2s_dev_rx == i2s_dev_tx) {
// ret = i2s_trigger(i2s_dev_rx, I2S_DIR_BOTH, cmd);
// if (ret == 0) {
// return true;
// }
// /* -ENOSYS means that commands for the RX and TX streams need
// * to be triggered separately.
// */
// if (ret != -ENOSYS) {
// printk("Failed to trigger command %d: %d\n", cmd, ret);
// return false;
// }
// }
ret = i2s_trigger(i2s_dev_rx, I2S_DIR_RX, cmd);
if (ret < 0) {
printk("Failed to trigger command %d on RX: %d\n", cmd, ret);
return false;
}
// ret = i2s_trigger(i2s_dev_tx, I2S_DIR_TX, cmd);
// if (ret < 0) {
// printk("Failed to trigger command %d on TX: %d\n", cmd, ret);
// return false;
// }
return true;
}
static const struct device * i2s_dev_rx = DEVICE_DT_GET(I2S_RX_NODE);
static const struct device * i2s_dev_tx = DEVICE_DT_GET(I2S_TX_NODE);
int main(void)
{
struct i2s_config config;
printk("I2S echo sample\n");
if (!pwm_is_ready_dt(&pwm_led0)) {
printk("Error: PWM device %s is not ready\n",
pwm_led0.dev->name);
return 0;
}
if (!pwm_is_ready_dt(&pwm_led1)) {
printk("Error: PWM device %s is not ready\n",
pwm_led0.dev->name);
return 0;
}
if (!init_buttons()) {
return 0;
}
if (!device_is_ready(i2s_dev_rx)) {
printk("%s is not ready\n", i2s_dev_rx->name);
return 0;
}
if (i2s_dev_rx != i2s_dev_tx && !device_is_ready(i2s_dev_tx)) {
printk("%s is not ready\n", i2s_dev_tx->name);
return 0;
}
config.word_size = SAMPLE_BIT_WIDTH;
config.channels = NUMBER_OF_CHANNELS;
config.format = I2S_FMT_DATA_FORMAT_I2S;
config.options = I2S_OPT_BIT_CLK_SLAVE | I2S_OPT_FRAME_CLK_SLAVE;
config.frame_clk_freq = SAMPLE_FREQUENCY;
config.mem_slab = &mem_slab;
config.block_size = BLOCK_SIZE;
config.timeout = TIMEOUT;
if (!configure_streams(i2s_dev_rx, i2s_dev_tx, &config)) {
return 0;
}
for (;;) {
k_sem_take(&toggle_transfer, K_FOREVER);
// if (!prepare_transfer(i2s_dev_rx, i2s_dev_tx)) {
// return 0;
// }
if (!trigger_command(i2s_dev_rx, i2s_dev_tx,
I2S_TRIGGER_START)) {
return 0;
}
printk("Streams started\n");
while (k_sem_take(&toggle_transfer, K_NO_WAIT) != 0) {
void *mem_block;
uint32_t block_size;
int ret;
ret = i2s_read(i2s_dev_rx, &mem_block, &block_size);
if (ret < 0) {
printk("Failed to read data: %d\n", ret);
break;
}
process_block_data(mem_block, SAMPLES_PER_BLOCK);
// ret = i2s_write(i2s_dev_tx, mem_block, block_size);
// if (ret < 0) {
// printk("Failed to write data: %d\n", ret);
// break;
// }
}
if (!trigger_command(i2s_dev_rx, i2s_dev_tx,
I2S_TRIGGER_DROP)) {
return 0;
}
printk("Streams stopped\n");
}
}
Here is the overlay file.
/*
* Copyright (c) 2021 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
&pinctrl {
pwm0_custom: pwm0_custom {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 17)>;
nordic,invert;
};
};
pwm0_csleep: pwm0_csleep {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 17)>;
low-power-enable;
};
};
pwm1_custom: pwm1_custom {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 13)>;
nordic,invert;
};
};
pwm1_csleep: pwm1_csleep {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 13)>;
low-power-enable;
};
};
i2s0_default_alt: i2s0_default_alt {
group1 {
psels = <NRF_PSEL(I2S_SDIN, 0, 26)>,
<NRF_PSEL(I2S_SCK_S, 0, 31)>,
<NRF_PSEL(I2S_LRCK_S, 0, 30)>;
};
};
i2s0_sleep: i2s0_sleep {
group1 {
psels = <NRF_PSEL(I2S_SDIN, 0, 26)>,
<NRF_PSEL(I2S_SCK_S, 0, 31)>,
<NRF_PSEL(I2S_LRCK_S, 0, 30)>;
low-power-enable;
};
};
};
i2s_rx: &i2s0 {
status = "okay";
pinctrl-0 = <&i2s0_default_alt>;
pinctrl-names = "default";
};
&pwm0 {
status = "okay";
pinctrl-0 = <&pwm0_custom>;
pinctrl-1 = <&pwm0_csleep>;
pinctrl-names = "default", "sleep";
};
&pwm1 {
status = "okay";
pinctrl-0 = <&pwm1_custom>;
pinctrl-1 = <&pwm1_csleep>;
pinctrl-names = "default", "sleep";
};
/{
pwmleds {
compatible = "pwm-leds";
pwm_led0: pwm_led_0 {
// pwms = <&pwm0 0 PWM_MSEC(20) PWM_POLARITY_NORMAL>;
pwms = <&pwm0 0 PWM_NSEC(250) PWM_POLARITY_NORMAL>;
};
pwm_led1: pwm_led_1 {
// pwms = <&pwm1 0 PWM_MSEC(20) PWM_POLARITY_NORMAL>;
pwms = <&pwm1 0 PWM_NSEC(250) PWM_POLARITY_NORMAL>;
};
};
aliases {
pwm-led0 = &pwm_led0;
pwm-led1 = &pwm_led1;
};
};
As I use the logic analyzer to read the microphone DOUT pin, I do see the data coming out. However, there is something wrong on the receiving end at NRF52832.
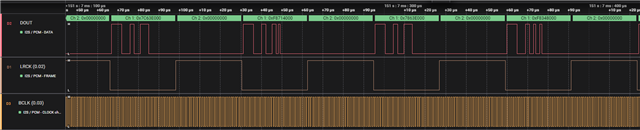
The error I am receiving is -11 that means timeout on read.
Kindly guide what could be at fault here.
Best.

