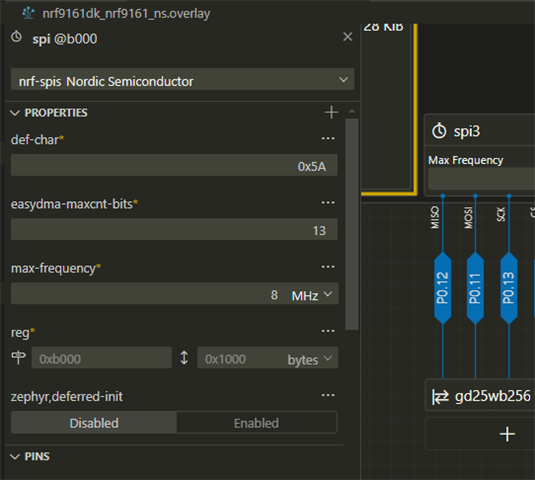
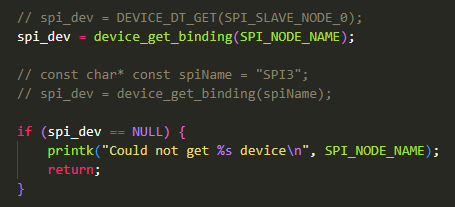
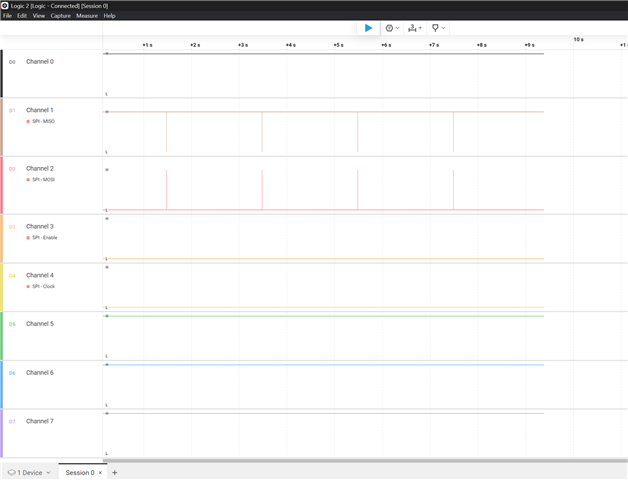
Hi there, I'm having so much trouble trying to get this two nRF9161 DK to communicate using SPI, being one Master and the other one Slave. I'm using the spi3 driver for SPI (spim for the Master one and spis for the Slave, I could not get the spi driver to build), but it does not work at all the communication. I'm not sure if it is because of my code, or my configuration/overlay, but something is quite wrong.
I'm attaching my Master project and my Slave project, so if anyone knows how to make it work can help me. I'm stuck, and there is no information on the internet for this nRF0161 DK to configure and make it work to communicate one to each other through SPI (master and slave each one). Any help would be awesome, I'm willing to use it to transmit large info, if possible, once i get it to simply work. Thanks in advance!
Both of the projects (one for each nRF9161) are attached within the zip file here.