Hi,
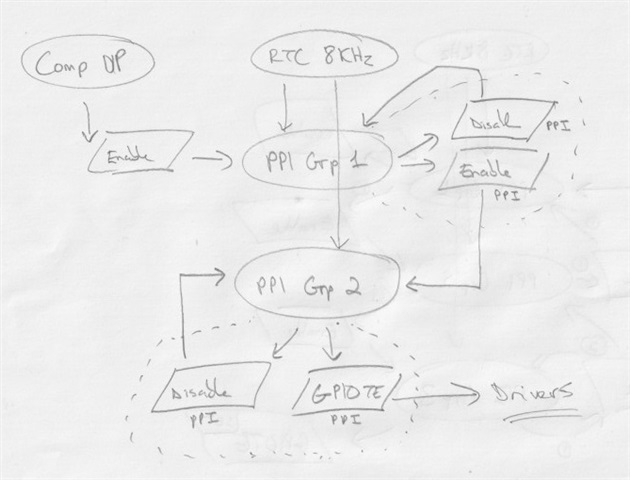
I previously wrote about an unexpected behaviour which I've made a diagram for below. It's relatively simple though, the COMP watches a voltage and fires a toggle event through PPI which is received by GPIOTE which toggles it's pin which controls an external circuit responsible for the voltage that COMP watches.
First the external circuit is switched off by a secondary means and the system is synced, so GPIOTE goes high and COMP goes high, then the secondary means is turned off so the driver activates and then it's purely a hardware based implementation.
I previously replicated the behaviour when the COMP speed was set to normal. This suggested that PPI or GPIOTE couldn't keep up with the events it was generating OR COMP was/is sometimes failing to generate the toggle event when the voltage has recovered. The behaviour means the GPIOTE remains low when the voltage has recovered.
The COMP speed was set to low, so 1MHz, and on the bench this appeared to have resolved the issue. However, a user is now reporting it again.