Dear,
I received THINGY:91 from NordicSemi. I use 10pins cable to connect to nRF9160 DK to program for THINGY:91.
and, I am using ncs_v1.0.0
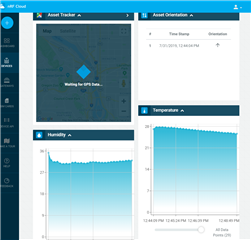
I am trying to run asset_tracker application,
and I am confusing about:
1. which board should I select? I tried to use ncs_v1.0.0/zephyr/boards/arm/nrf9160_pca10090
but after programming, the LED on THINGY:91 changed to RED color, and I couldnt connect it from nrfcloud
I couldn't find pca20035 on ncs_v1.0.0. Do I need to use another version of ncs ?
2. How can I debug the output from THINGY:91
The terminal still shows the output from nRF9160 DK, nothing from THINGY:91
Thanks,
Mvh
Hoang Nguyen