Hi,
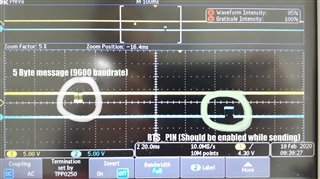
I'm using app_uart for communication between different mcu. I can send more than 1 byte like "0x3917015623" through changing tx_buffer[0] to tx_buffer[5]. Unfortunately i couldn't recieve the slave devicess message "0x2917013607". I can only get the first byte "0x07". My configuration are the same as uart example. How can i recieve all the message ?. I tried to use serial library but i couldn't initialize. (It gave ERROR 6 NRF_ERROR_NOT_SUPPORTED).
Slave device is sending me a message every second. And i'm calling app_uart_get function every 500 miliseconds.
Here is my uart init;
void uart_error_handle(app_uart_evt_t * p_event)
{
if (p_event->evt_type == APP_UART_COMMUNICATION_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_communication);
}
else if (p_event->evt_type == APP_UART_FIFO_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_code);
}
}
void uart_init(void)
{
uint32_t err_code;
const app_uart_comm_params_t comm_params =
{
RX_PIN_NUMBER,
TX_PIN_NUMBER,
RTS_PIN_NUMBER,
CTS_PIN_NUMBER,
UART_HWFC,
false,
#if defined (UART_PRESENT)
NRF_UART_BAUDRATE_115200
#else
NRF_UARTE_BAUDRATE_9600
#endif
};
// const app_uart_buffers_t m_buffers =
// {
// &rx_buffer_s,
// sizeof(rx_buffer_s),
// &tx_buffer_s,
// sizeof(tx_buffer_s)
// }
APP_UART_FIFO_INIT(&comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_error_handle,
APP_IRQ_PRIORITY_LOWEST,
err_code);
APP_ERROR_CHECK(err_code);
// err_code = app_uart_init(&comm_params, &m_buffers, uart_error_handle, APP_IRQ_PRIORITY_LOW);
// APP_ERROR_CHECK(err_code);
}
Regards,