Dear,
Im trying to use the motion to activate the GPS and deactivate GPS:
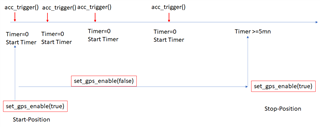
1. when it moves, GPS will be activated: Position-ON
2. when it stops, GPS will be activated again: Position-OFF
Currently, I used the sensor_trigger_set() to enable GPS when it detects the motion as in :https://github.com/NordicPlayground/fw-nrfconnect-nrf/tree/master/applications/asset_tracker
But, I dont know how to implement the step 2: when it stops, GPS will be activated again: Position-OFF
Could you plz help me, thanks so much
My HW: THINGY:91
Modem FW: v1.1.1
ncs_1.2.0
BR,
Hoang Ng