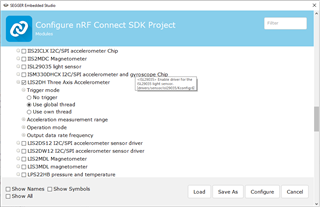
Running the Zephyr LIS2DH sample program on a custom board works fine until I configure it to use the trigger and then it throws the z_arm_mpu_fault() error. It doesn't matter if I have it use it's own thread or the global thread.
Any idea what could be causing this?