Hi
I'm trying to drive a 75hc595-type shift register with a SPIM instance on the nrf54l15.
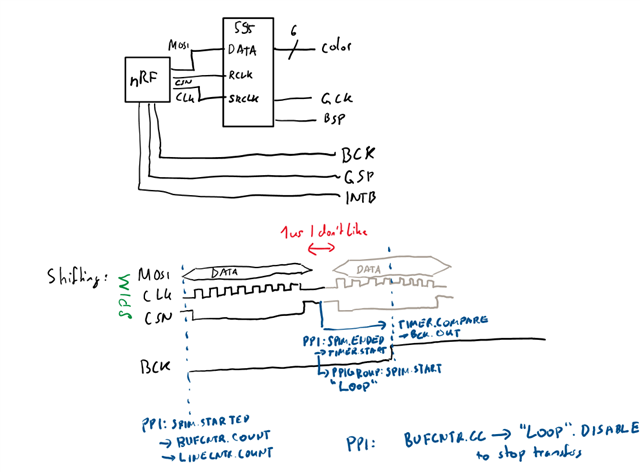
I connect MOSI to the shift register data input, CLK to the shift register clock, and CSN to the output-stage-enable register (i.e. latch from the input shifter to the output). I use the maximum frequency of the SPIM22, namely a prescaler of 2, to reach 8MHz on the output, aiming for 1 MHz output on the shift register. To set the outputs, I use EasyDMA in List mode with a MAXCNT of 1. Using CSNPOL Low, CSN is driven HIGH at the end of the transfer, thus sampling automatically into the shift register. I set IFTIMING.CSNDUR to 0.
Because I have a fixed number of bytes to sample (~240), I use a TIMER22 as a byte-counter, and a PPI group in DPPI20. I link the SPI ENDED event to the SPI STARTED event in one PPI channel, which I add to a PPIGROUP, and into the TIMER22 COUNT event. I then program a CC to the maximum number of bytes, and link it in another PPI channel to the PPIGROUP DISABLE task to break the loop and stop transferring after the programmed number of bytes.
I was expecting _some_ delay caused by the CSN and rearming. But I'm observing >1us of delay between clock pulse sequences (i.e. SPI transfer active), resulting in an oscilloscope-measured time of 2us (instead of slightly more than 1us expected) between CSN pulses, halving the aimed-for frequency. Essentially, the bus idles for 1 us after every byte (which also takes 1us to transfer).
I'm a bit confused about these delays. I know that SHORTS.END_START is supposed to use IFTIMING.CSNDUR as a delay in peripheral clock cycles, so this should be 1/16 us (or 1/8 us) - not a full microsecond, so the peripheral is supposed to be faster. From what I understand from the documentation, the counter is also counting with a max delay of 1 from the PCLK, which is also 16MHz - but what I'm seeing looks like a clock of 1 MHz dominating the results.
Could you kindly point me to my mistake? I'm thinking about using the DMA TX END (rather than the SPI END) event to queue the next transfer, but I'm a bit hesitant regarding the safety of such a hack. Would the timings guarantee that the latency is enough to trigger only after the ENDED event? What would happen if the START task is triggered before (or in the same cycle where) the SPI ENDED event fires?
Is there another, better way? I was thinking about using the SPIM to transfer one array of 240 bytes at once, and pulsing the shift-latch using a different timer, but I'm a bit weary about the ultra-tight and hard-to-debug timing requirements caused by this approach given that my understanding of the PPI latencies already seems to be off.