Hi Team,
Currently I am working with nRF54LM20 DK. And tried to import and use echo bot example from SDK.
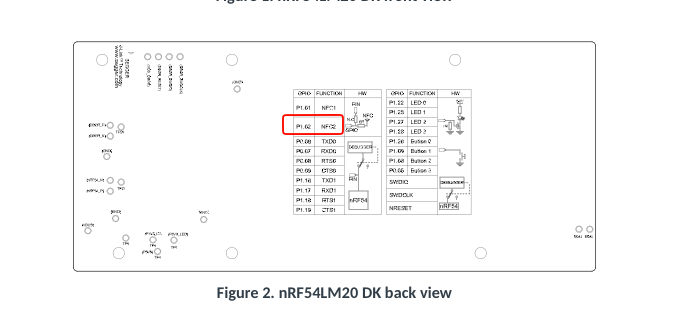
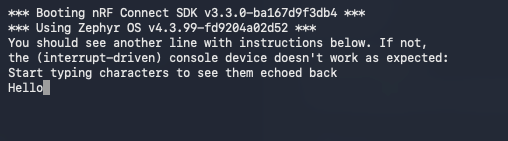
And modified the overlay file as per the UART pin changes required for my application. But I am not able to see any UART prints on console.
Adding overlay file contents here
&pinctrl {
uart21_default: uart21_default {
group1 {
psels = <
NRF_PSEL(UART_TX, 1, 2) /* TX → P1.02 */
NRF_PSEL(UART_RX, 1, 3) /* RX → P1.03 */
>;
};
};
uart21_sleep: uart21_sleep {
group1 {
psels = <
NRF_PSEL(UART_TX, 1, 2)
NRF_PSEL(UART_RX, 1, 3)
>;
low-power-enable;
};
};
};
&uart21 {
status = "okay";
current-speed = <115200>;
pinctrl-0 = <&uart21_default>;
pinctrl-1 = <&uart21_sleep>;
pinctrl-names = "default", "sleep";
};
/ {
chosen {
zephyr,console = &uart21;
};
};
Please let me know the issue I am facing to use this bus.
Thanks and regards,
Vinay